Појам, врсте, намена и конструкција робота
|
| ||||

Роботика
Роботика је наука која се бави проучавањем начина рада, конструисањем и применом робота у различитим подручјима људске делатности.
Још у античко доба забележени су покушаји прављења аутомата.
Роботика је наука која се бави проучавањем начина рада, конструисањем и применом робота у различитим подручјима људске делатности.
Још у античко доба забележени су покушаји прављења аутомата.
Водене оргуље Херона Александријског
Познати су делимично аутоматизована позоришта и музичке машине из 15. века од Леонарда да Винчија.

Модел робота направљеног на основу скица Леонарда да Винчија
Српски математичар и академик Михајло Петровић Алас је конструисао први аналогни хидраулични рачунар тзв. хидрогенератор, због чега га сматрају зачетником кибернетике.
Савремена решења роботске руке:
Савремена решења роботске руке:
|
|

|
Ако желиш можеш погледати поставку аутомата у музеју у Њујорку.
Исак Асимов ја амерички писац научне фантастике који је поставио прве законе роботике:
Први индустријски роботи примењени су у Фордовим фабрика у САД (1954) који је омогућио програмирани пренос делова (изум: G. Devol). У другој половини XX века роботи су се развијали у индустријски развијеним земљама света, а посебно у Јапану, Америци и Великој Британији, тако да данас у свету постоји више од милиона робота.
Роботи замењују човека првенствено на опасним, монотоним и тешким пословима. Тако доприносе повећању производње и хуманизацији рада.
Постоје два разлога зашто је примена робота оправдана:
Врсте робота
хуманоидни робот - имају облик људског тела. Уколико опонашају кретање и покрета људи ради се о андроидима.
Исак Асимов ја амерички писац научне фантастике који је поставио прве законе роботике:
- I закон - Робот не сме повредити људско биће нити устезањем од делања дозволити да оно буде повређено.
- II закон - Робот се мора повиновати наређењима које добија од људских бића изузев када су она у супротности са I законом.
- III закон - Робот мора штитити своју сопствену егзистенцију изузев у случају када је та заштита у супротности са I и II законом.
- Робот је аутомат с људским ликом;
- Робот је машина управљана рачунаром који обавља различите, често врло сложене операције;
- Робот је машина израђена по узору на човека;
- Индустријски робот је репрограмабилни вишефункционални систем пројектован за покретање материјала, делова алата или специјалних уређаја дуж променљивих програмских кретања који при том обавља различите задатке.
Први индустријски роботи примењени су у Фордовим фабрика у САД (1954) који је омогућио програмирани пренос делова (изум: G. Devol). У другој половини XX века роботи су се развијали у индустријски развијеним земљама света, а посебно у Јапану, Америци и Великој Британији, тако да данас у свету постоји више од милиона робота.
Роботи замењују човека првенствено на опасним, монотоним и тешким пословима. Тако доприносе повећању производње и хуманизацији рада.
Постоје два разлога зашто је примена робота оправдана:
- Постоји потреба да се на опасним, неприступачним местима замени човек, или су процеси врло сложени па их човек не може извести (код нуклеарних реактора у простору зрачења, у великим дубинама у води, при истраживању у свемиру, у близини испарљивих гасова, непожељног зрачења и температуре.
- Роботи могу реализовати врло сложене задатке поуздано, без грешки, без замора и онолико дуго колико је то потребно а може се извршити промена задатка (променити програм).
Врсте робота
хуманоидни робот - имају облик људског тела. Уколико опонашају кретање и покрета људи ради се о андроидима.
|
|
|
Киборг - људско биће са машинским апликацијама. То је напредак биомедицинског инжињеринга (вештачки удови, пејсмејкер, синтетичке телесне и органске протезе).

|

|
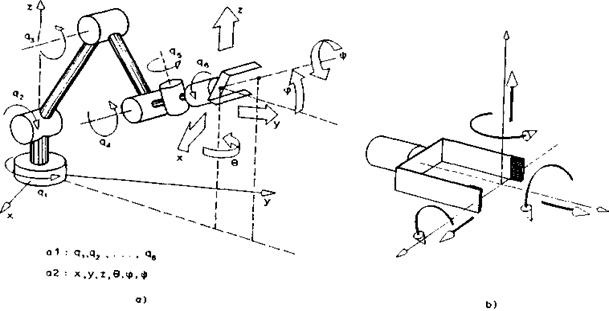
Индустријски робот - је уређај великих могућности кретања, опремљен механичком руком (манипулатор) и засебним управљачким системом реализованим на електронском рачунару.
Фабрика у којој раде само роботи.
Комуникациони роботи - Јапанци најављују нову врсту робота са силиконском кожом која ће бити осетљива на додир.
Да би смо лакше користили роботе и аутомате, и да би смо га могли сами израдити, треба познавати следеће о роботу:
Робот се састоји од елемената (делова) који су чврсто спојени, или се међу собом могу померати. Два међу собом померљива елемента робота чине кинематски пар.
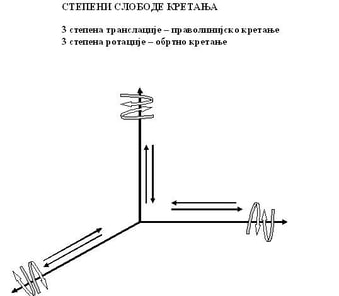
Најчешће примењивани кинематски парови код робота су цилиндрични зглоб који омогућује једну ротацију и клизно лежиште које дозвољава једну транслацију. Најмањи број параметара којим се описује кретање зове се степен слободе кретања.
Да би смо лакше користили роботе и аутомате, и да би смо га могли сами израдити, треба познавати следеће о роботу:
- механику (која се кретања и како извршавају),
- конструкцију,
- погон и
- управљање.
Робот се састоји од елемената (делова) који су чврсто спојени, или се међу собом могу померати. Два међу собом померљива елемента робота чине кинематски пар.
Најчешће примењивани кинематски парови код робота су цилиндрични зглоб који омогућује једну ротацију и клизно лежиште које дозвољава једну транслацију. Најмањи број параметара којим се описује кретање зове се степен слободе кретања.
|

|
Простор у коме се креће радни орган представља радни простор робота. Више повезаних кинематичких парова чини кинематски ланац.
Да би се решило одређено кретање робота морају се формирати дијаграми кретања по сваком степену слободе, тзв. циклограми кретања.
Да би се решило одређено кретање робота морају се формирати дијаграми кретања по сваком степену слободе, тзв. циклограми кретања.
За остваривање кретања и преношење одређеног оптерећења робота користе се разни елементи и преносни механизми: полуге, зупчасти и ланчасти преносници. Примењују се и специфични уређаји као што су сензори на притисак, сензори на светлост, електро-прекидачки сензори, сензори за контролу положаја (потенциометри, бројачи и сл.) и др.
Погон робота
Погон робота је најчешће електрични: електромоторима и ређе електромагнетима. Понекад се примењује и хидраулични, или пнеуматски погон робота, када се користе хидраулични цилиндри, или хидраулични мотори.
Управљање роботима
Постоје два начина управљања:
- по отвореној и
- затвореној спрези.
По затвореној спрези елементу робота се задаје кретање и одмах се добија податак о извршењу, врши упоређење са задатим кретањем и врши аутоматска корекција кретања.
Најједноставнији начин реализације управљања роботом се изводи коришћењем рачунара. Тада се постављени задатак лако реализује коришћењем одређеног програма и укључењем/искључењем управљачког релејног система преко интерфејса у реалном жељеном времену.
.Сазнај више о роботима: Свет роботике
Погледај и презентацију:
